ここでは自作60cmドブソニアン計画で用いるドブソニアン架台の高度軸・水平軸について検討します。
4.10.1. 高度軸の回転に必要な力
結論: 自作60cmドブソニアン計画では望遠鏡の高度軸を動かすために必要な力 FEl は 2 ~ 4 kgf となるよう、摩擦係数 μ、高度軸の半径 rEl 、高度軸受けのなす角 θsep を最適化した設計とする。
ドブソニアン架台はフリーストップで望遠鏡が完全にバランスし、軽い力で自由に動かすことが出来つつ、アイピースの交換によって勝手に動かないようなものが理想といえます。 そこでここでは高度軸の回転に必要な力がどの程度なのか考察します。
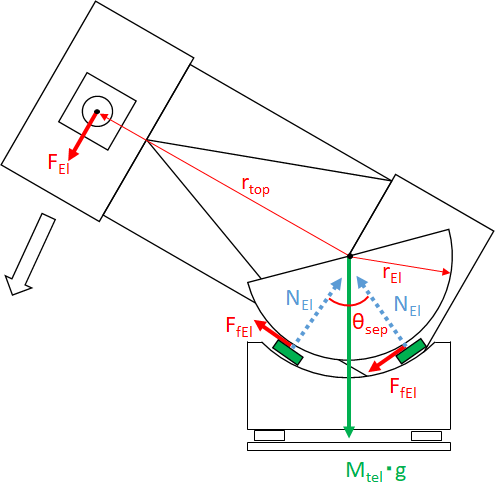
ここでアイピース付近で FEl の力を加えて高度軸を操作する場合を考えると、望遠鏡の鏡筒部分の質量を Mtel、重力加速度 g、高度軸の半径 rEl、トップケージまでの距離 rtop 、2つの高度軸受けのなす角 θsep、摩擦係数 μ とすると、完全にバランスのあった望遠鏡の鏡筒部分を動かすためには摩擦力 FfEl よりも大きな力 FEl を加える必要があり、それは以下の式で表されます。
![]()
よって高度軸の半径 rEl が大きければ大きいほど、また2つの高度軸受けのなす角 θsep が大きければ大きいほど、望遠鏡を動かすために必要な力 FEl は大きな力が必要になることがわかりました。
ここで自作40cmドブソニアンの場合の数値を代入して具体的に計算してみました。
| パラメーター | 値 |
|---|---|
| 摩擦係数 μ(テフロン+アルミ) | 0.16 |
| 鏡筒部分の質量 Mtel | 33.2 kg |
| 高度軸の半径 rEl | 0.20 m |
| トップケージまでの距離 rtop | 1.24 m |
| 高度軸受けのなす角 θsep | 70 deg. |
| 必要な力 FEl | 1.0 kgf |
計算の結果から自作40cmドブソニアンの場合には高度軸を動かすには 1.0 kgf 以上の力を加える必要があることが分かりました。 また望遠鏡を動かすために 1.0 kgf の力が必要と言うことは、つまりトップケージの位置で 1.0 kg よりも重量変化が小さければ望遠鏡は動かないことも意味します。 自作40cmドブソニアンではアイピースを取り外して望遠鏡のバランスが崩れても高度軸は勝手に動くことなく、狙った天体に向き続けていましたが、計算結果はこの経験とも合致します。 ただし Nagler Type5 31mm など 1 kg を超えるアイピースを取り付け、特に低空に向けた場合にはトップヘビーで望遠鏡が動き出すことがありました。
自作60cmドブソニアン計画は高倍率での観望・スケッチを目的として製作する予定で、アイピースも積極的に交換して楽しみたいと思います。 自作40cmドブソニアンではアイピースの組み合わせによって望遠鏡が勝手に動き出すこともあり、不便でした。 また強風時にも勝手に動いて危険だと感じたことが何度もありました。 そこで望遠鏡の高度軸を動かすために必要な力 FEl は 2 kgf 以上となるよう摩擦係数 μ、高度軸の半径 rEl 、高度軸受けのなす角 θsep を最適化した設計にしたいと思います。 また FEl が大きくなればそれだけ望遠鏡の操作に大きな力が必要になるため、FEl の上限値として(エイヤで) 4 kgf という値も設定したいと思います。
ページの先頭に 戻る
4.10.2. 高度軸のオフセット
結論: 自作60cmドブソニアン計画では望遠鏡の高度軸を光軸に対してオフセットして取り付けることで鏡筒モーメント(バランス)を最適化する。
まず高度軸のオフセットを考える前に、どういう状態がドブソニアン架台に求められるか考えます。 ドブソニアン架台はフリーストップで望遠鏡が完全にバランスし、軽い力で自由に動かすことが出来つつ、アイピースの交換によって勝手に動かないようなものが理想といえます。 そのため鏡筒部分は高度軸を回転中心としてバランスが合っている(モーメントが釣り合っている)必要があります。
ここで各要素(アイピースやファインダー等)の質量を mi、 位置を ![]() と書くと鏡筒部分の重心(質量の中心)
と書くと鏡筒部分の重心(質量の中心)![]() は以下の式で表せます。
は以下の式で表せます。
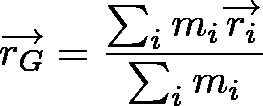
![]()
となります。
よって高度軸を鏡筒部分の重心 ![]() と一致するように設計・製作すれば上式を満たし、モーメントの和はゼロとなってバランスは合ったことになります。
と一致するように設計・製作すれば上式を満たし、モーメントの和はゼロとなってバランスは合ったことになります。
ここで、高度軸のオフセットについて考察します。 上に書いた通り、高度軸の位置が鏡筒部分の重心となるように設計・製作すれば鏡筒バランスは合うのですが、一般にファインダー、アイピース、高度軸といったいくつかの構成要素は光軸上ではなく、オフセットされた位置に取り付けらることになります。そのため上記のモーメントの釣り合いは2次元ベクトルの釣り合いとして考える必要があります。 といって、何のことか分からないと思いますので、以下の図で説明したいと思います。
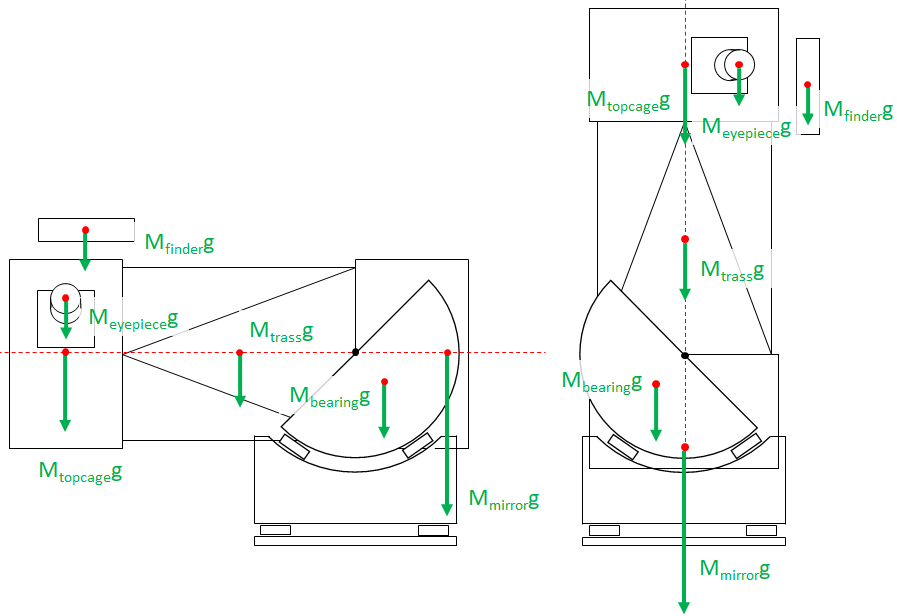
左図は高度 0° のドブソニアンと各要素の重心位置(赤丸)を表し、右図は高度 90° の状態を表します。 左図のように望遠鏡が高度 0° を向いている場合には高度軸の中心(黒丸)の左側の要素「トップケージ」「アイピース」「ファインダー」「トラス」と右側の要素「高度軸」「ミラーボックス(主鏡、セル含む)」のバランスが合うようにすればバランスは合うことになります。 よって鏡筒部分のバランスを合わせるため、設計・製作時には光軸(赤点線)方向に高度軸の位置を動かして最適なバランス位置を見つけることになります。
一方、右図のように望遠鏡が 90° を向いている場合、バランスが合う条件は、高度軸の中心(黒丸の)左側の要素「高度軸」と右側の要素「アイピース」「ファインダー」のバランスを合わせることになります。 これは先ほどの高度 0° の時と条件が違います。 そして、このバランスを合わせるためには光軸(赤点線)と直交する方向に高度軸の位置を動かして最適なバランス位置を見つける必要があります。 そのため高度軸は光軸に対して「オフセット」して取り付ける必要があります。
この高度軸のオフセットはかなり重要なものだと私は考えています。 実際、高度 20~70° ぐらいの範囲だとバランスが合ってフリーストップで問題なく使えるドブソニアンでも、それ以外の範囲では勝手に動いてしまう(低空だと倒れる方向に動いたり、天頂付近だと起き上がってきたりする)ようなドブソニアンも何台か見たことがあります。 これらは高度軸のオフセットが適切に設計されていないから生じていると思われます。
自作60cmドブソニアン計画では快適なフリーストップ架台を実現するため高度軸のオフセットについても設計段階から盛り込み、完全バランスを目指したいと思います。
ページの先頭に 戻る
4.10.3. 水平軸の回転に必要な力
結論: 自作60cmドブソニアン計画では望遠鏡の水平軸を動かすために必要な力 FAz は高度角 θEl=60°で 2 ~ 4 kgf を目指す。構造はまずはシンプルにテフロン+FRP板の通常の軸受けとし、もし回転が非常に重く観望やスケッチに支障が出るようであればターンテーブルを使用した軸受けに変更する。
ドブソニアン架台はフリーストップで望遠鏡が完全にバランスし、軽い力で自由に動かすことが出来つつ、風で勝手に望遠鏡が回転しないようなものが理想といえます。 そこでここでは水平軸の回転に必要な力がどの程度なのか考察します。
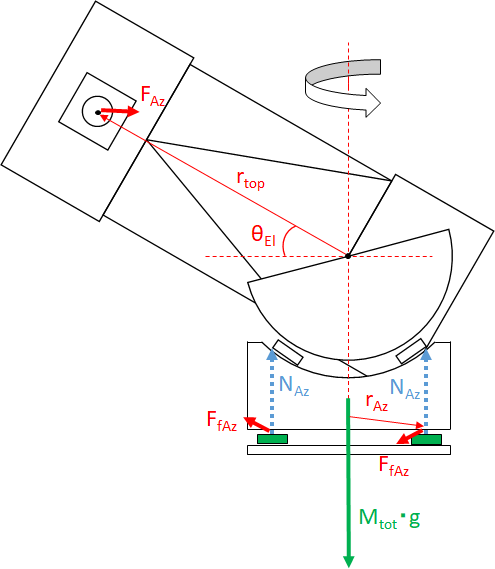
ここでアイピース付近で FAz の力を加えて水平軸を操作する場合を考えると、望遠鏡の質量を Mtot、重力加速度 g、望遠鏡の高度角 θEl、トップケージまでの距離 rtop 、水平軸の半径 rAz、摩擦係数 μ とすると、完全にバランスのあった望遠鏡を水平回転させるためには摩擦力 FfAz よりも大きな力 FAz を加える必要があり、それは以下の式で表されます。
![]()
ここで自作40cmドブソニアンの場合の数値を代入して具体的に計算してみました。
| パラメーター | 値 |
|---|---|
| 摩擦係数 μ(テフロン+FRP) | 0.09 |
| 望遠鏡の質量 Mtot | 47.4 kg |
| 水平軸の半径 rAz | 0.24 m |
| トップケージまでの距離 rtop | 1.24 m |
| 必要な力 FAz | 0.95 kgf @θEl=30° 1.2 kgf @θEl=45° 1.7 kgf @θEl=60° 3.2 kgf @θEl=75° |
計算の結果、自作40cmドブソニアンの場合には水平軸を回転させるには 高度角 θEl=60°の時に 1.7 kgf 以上の力を加える必要があることが分かりました。 自作40cmドブソニアンでは風によって高度軸は勝手に動くことはあっても水平軸は勝手に動いたことはありませんでしたが、計算結果はこの経験とも合致します。 むしろ水平回転に必要な力が大きすぎて、特に高度の高い天体を見るときに回転させるのに力が必要で大変でした。 (摩擦係数を小さくするため2015年に「テフロン+アルミ板」から「テフロン+FRP」に変更し、だいぶ軽くはなりましたが、それでも天頂付近は大変でした。)
そこで自作60ドブソニアン計画の場合は水平軸の回転に必要な力は自作40cmドブソニアンと同じ程度、具体的には高度軸と数値を合わせ、水平軸もその回転に必要な力 FAz は高度角 θEl=60°のとき 2 kgf 以上 4 kgf 以下となるように最適化した設計としたいと思います。
ただし自作60ドブソニアン計画の場合、口径が大きくなるため望遠鏡全体の質量 Mtot や水平軸の半径 rAz は大きくなる一方、焦点距離はほとんど変わらないためトップケージまでの距離 rtop はあまり変わりません。 そのため水平軸の回転に必要な力 FAz は必然的に大きな力が必要になることが予想されます。
ページの先頭に 戻る
4.10.3.1. ターンテーブルの使用
そこで水平軸の回転に必要な力 FAz を小さくする方法として、摩擦係数 μ が小さくなるような構造を考えます。 例えばターンテーブル、例えばスガツネ工業の ターンテーブル HF型 HF60 といった製品を水平軸に使用することを考えます。 ターンテーブルはスラストボールベアリングとなっており、テフロンパッドを使った軸受けより一桁以上小さい摩擦係数で加重を支えることが出来ます。 そのため水平軸の回転に必要な力も一桁以上小さい値となることが期待されます。 むしろ軽くなりすぎるため加重を調整するためのブレーキが必要になると予想されます。
ここで自作60cmドブソニアン計画の場合、できればシンプルな構造としたいと考えています。 そこで水平軸はまずは自作40cmドブソニアンと同様のテフロンパッドとFRP板の組み合わせとして、もし水平回転が非常に重く、観望・スケッチに支障が出るようであればターンテーブルの使用を考えることにしたいと思います。
ページの先頭に 戻る
4.10.4. 水平回転の出っ張り
結論: 自作60cmドブソニアン計画ではバックラッシュのないスムーズな水平回転のため「出っ張り」をミラーボックスに取り付ける。
自作40cmドブソニアンでは水平軸を回転させた時、小さな角度の回転は難しく、力を抜くと再び元の位置に戻ってしまうような現象(バックラッシュ)があって天体導入にストレスを感じていました。 そこで自作60cmドブソニアン計画に際して色々と考えたのですが、この現象は「ミラーボックス」と「ロッカーボックス」の間の隙間に起因することに気がつきました。
以下の図の左側が自作40cmドブソニアンで水平回転させたときの状態になります。 ドブソニアンを上から見た状態の模式図で、灰色の部分がミラーボックスで黄色の部分がロッカーボックスを表します。
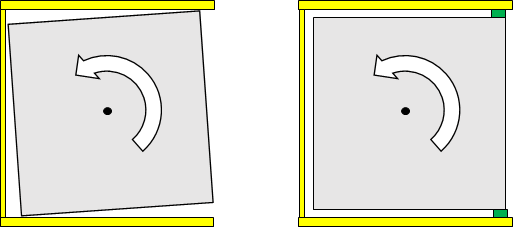
ここでドブソニアンを水平回転させようと矢印の向きに力を加えると、角度が小さいと左図のようにミラーボックスだけ回転してロッカーボックスは回転していないような状態になります。 力を加えている間はこの状態を維持しますが、ミラーボックスは高度軸を介してロッカーボックスに載っているだけなので、いったん力を抜くとミラーボックスは元の位置に戻ってしまいます。 これが水平回転のバックラッシュの原因と考えられます。
もちろんミラーボックスとロッカーボックスの隙間がないように製作すればバックラッシュも生じないはずです。 が、そうすると摩擦が増え、高度軸回転が重くなってしまうと予想されます。 そこで右図ようにミラーボックスの角に小さなパッド(図では緑色で描いています)、すなわち「出っ張り」を取り付けることを考えます。 この出っ張りは高度軸・水平軸と同様にテフロンで作ります。 出っ張りを取り付けることで水平回転時にバックラッシュが小さくなり、また小さなテフロンパッドとすることで高度軸回転への影響(摩擦力の増大)も最小に出来ると思われます。
自作60cmドブソニアンではバックラッシュのないスムーズな水平回転を実現したいと思います。 そこでここで議論したような「出っ張り」をミラーボックスに取り付けることにします。
ページの先頭に 戻る
4.10.5. 軸受けの材質
結論: 自作60cmドブソニアン計画では静止摩擦係数と動摩擦係数の差の小さい組み合わせの材質である「テフロン」+「FRP」の組み合わせの軸受けを採用する。
摩擦係数 に書いたように、ドブソニアンの高度軸・水平軸の軸受けの材質には静止摩擦係数と動摩擦係数の差が小さい組み合わせが適しています。 これはもし静止摩擦係数と動摩擦係数の差が大きい場合には望遠鏡を少しだけ動かそうと力を徐々に加えていくと、あるところで動き始め、その瞬間摩擦力が小さくなってしまって意図した以上に動いてしまうためです。 もし静止摩擦係数と動摩擦係数が完全に一致していれば、滑らかに動き始め、滑らかに止めることが出来るはずです。
ここで 摩擦係数 に書いたように静止摩擦係数と動摩擦係数の差が小さい組み合わせは私の調べた限り「テフロン」+「FRP」でした。 そこで自作60cmドブソニアン計画で採用する軸受けの材質の組み合わせは「テフロン」+「FRP」としたいと思います。
ページの先頭に 戻る
4.10.6. 軸受けの面積 <設計変更>
結論(設計変更): 「テフロン」パッドの面積が小さいとパッドが削れ、摩擦力も大きくなる。 ある程度よりも小さい圧力となるよう設計する。 具体的に経験則的には 1.3 kg/cm2 程度であれば問題は生じないようだ。
(過去の結論: 自作60cmドブソニアン計画では軸受けに使用する「テフロン」パッドの面積は摩擦力に影響しない。軸受けの面積は考慮する必要なない。
自作60cmドブソニアン計画では高度軸・水平軸の軸受けの材質の組み合わせとして「テフロン」+「FRP」を使用することを検討していますが、ここで使用する「テフロン」パッドの大きさ(面積)について考察します。
高校物理で習う通り、摩擦力は接触部分の面積や速度に寄らず、垂直抗力にのみ比例します。 よってテフロンパッドの大きさ(面積)は大きくても小さくても摩擦力は変わらず、望遠鏡の動作にも関係しないことになります。 そのためテフロンパッドは望遠鏡の質量が大きくなったからといって特に大きくする必要はなく、任意の大きさで製作しても同じように機能するはずです。 よって自作60cmドブソニアン計画では軸受けに使用する「テフロン」パッドの大きさは特に設計に盛り込む必要はないと考えられます。
ページの先頭に 戻る
設計変更
当初の設計ではテフロンパッドの面積は摩擦力に影響しないと高校物理で習ったことを盲目的に信じて設計していましたが、実際にはテフロンパッドにある程度の荷重がかかるとテフロンパッドが削れ、またテフロンパッドが変形して摩擦力が増大することがわかりました。
その結果、望遠鏡を動かそうと加重を加えると最初にわずかにぬるっと非リニアな動きがまず生じ、その後ぐいっと動き出すといったような挙動となり、リニアな操作感が得られませんでした。 またテフロンパッドも削れてしまうようで、僅かずつ削れていき、徐々に操作感も重くなっていくようでした。
そこで軸受けの面積を変更することにしました。 当初設計では水平軸はφ34 mm のパッド3個で加重約 80 kg を支えていたので圧力は 2.9 kg/cm2 でした。 この圧力ではテフロンパッドは弾性変形し、また削れるようでした。 そこでφ 51 mm のパッド3個に変更し、圧力が 1.3 kg/cm2 にしたところ、パッドが弾性変形するような変な非リニアな挙動はなくなり、またほとんど削れなくなりました。
また高度軸の圧力も計算してみましたが、こちらは鏡筒部分の重量が約 60 kg に対して 30 mm × 40 mm のパッド4個で支える構造となっており、圧力は約 1.3 kg/cm2 と計算されました。 高度軸の場合には見た限りテフロンが削れているような様子はないため、この圧力なら削れないようです。
よって軸受けに使用するテフロンパッドを大きさ(面積)は任意でよいというわけではなく、経験則的に「テフロン」+「FRP」の組み合わせであれば 1.3 kg/cm2 程度かそれよりも小さい圧力となるように設計する必要があると言えそうです。
ページの先頭に 戻る
4.10.7. 水平軸の回転中心
結論: 水平軸の回転中心は「ブレない」ことが重要。ブレないような構造とする。
自作40cmドブソニアンの ロッカーボックス では水平軸の回転中心はM8ボルトを使いましたが、軸受け側はただ単に木に穴を開けるのではなく外径10mm内径8mmの真鍮パイプを入れて補強して、軸がずれないように工夫していました。 これで十分な強度を有していたようで、水平回転に際して特二問題は感じませんでした。 同様に自作60cmドブソニアンでも同じような構造として、水平軸の回転軸がブレないようにしたいと考えます。
ページの先頭に 戻る
当初運用
近所のホームセンターで直径 3/8 inch = 9.525 mm のピンを見つけたため、これを回転中心としました。 ロッカーボックス底面の合板に 3/8 inch のドリルで開けた穴とぴったりで、ガタガタせず、滑らかに回ります。 そのため軸受け側の補強は不要と判断し、これで運用することにしました。
ページの先頭に 戻る
その後
その後ロッカーボックス底板に 18 mm 合板を追加して補強した際、適当な長さのピンを見つけることができなかったため水平軸を通常のボルトに交換しました。 そのためなのか、補強して3年ぐらい運用した2022年3月頃、水平回転させるとどうしてもバックラッシュが生じ、狙ったところにうまく向けられなくなってしまいました。 色々と調べたところ、グランドボードに開けた穴がグズグズになっていて 1 mm ぐらい軸がブレて動き、これが原因で生じているのではないかと考えました。
そこでナットに鉄板を溶接し、それをグランドボードにボルト止めで固定して回転軸がぶれないようにしました。 軸受け側は厚さ 36 mm の合板のままですが、ボルトのネジの切っていないところでぴったりの直径でうまく回っているためこれでひとまず運用することにしました。 2022年4月に使ってみたところ、以前のようなバックラッシュの無い操作感に戻りました。 よって水平軸の回転中心は「ブレない」ことが重要で、それがバックラッシュのない操作感に繋がることがわかりました。
ページの先頭に 戻る