ここでは主鏡セルについて検討します。
- 主鏡裏面の支持方法
- 主鏡裏面の支持点のバランス
- 主鏡裏面の支持点の材質
- 主鏡側面の支持方法
- 主鏡側面の支持点の位置
- ゆりかご式か個別サポート式か
- 主鏡セル自体のたわみ
- 主鏡の光軸調整
- トラス棒の接続 <設計変更>
- 主鏡セルの重量
- 主鏡の脱落防止
- ジャッキ機構 <設計変更>
4.3.1. 主鏡裏面の支持方法
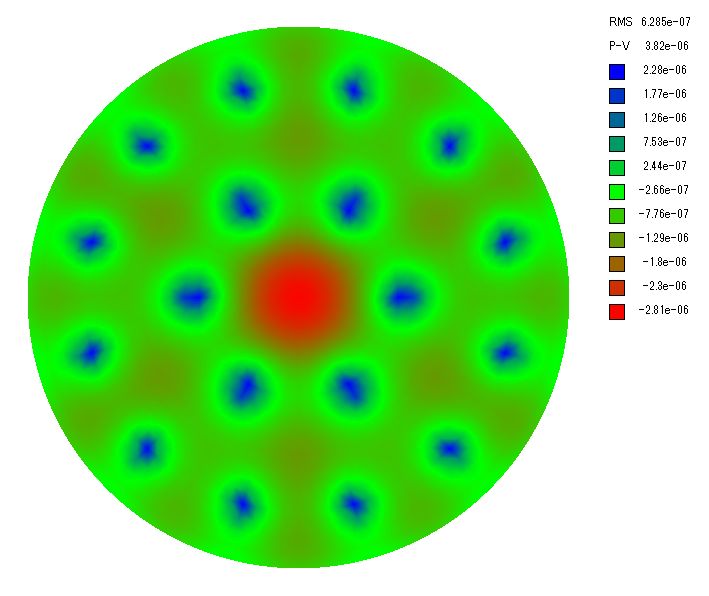
結論:自作60cmドブソニアン計画ではPlopで最適化した「18点支持」の主鏡セルで主鏡裏面を支持する。 主鏡セルによってPVで約λ/16の波面誤差が見込まれる。
Plopと言う名前の有限要素法による主鏡支持点の最適化ソフトが Automated Mirror Cell Optimization で公開されています。 そこで Plop を使って自作60cmドブソニアン計画で使用が見込まれる主鏡について、そのたわみ量(鏡面誤差)を計算してみました。
| 主鏡直径 | 609.6 mm |
| 主鏡厚さ | 38.1mm |
| 焦点距離 | 2011.68 mm |
| 副鏡直径 | 139.7 mm |
| 主鏡支持点数 | 垂直時のたわみ量 (RMS) | 垂直時のたわみ量 (PV) |
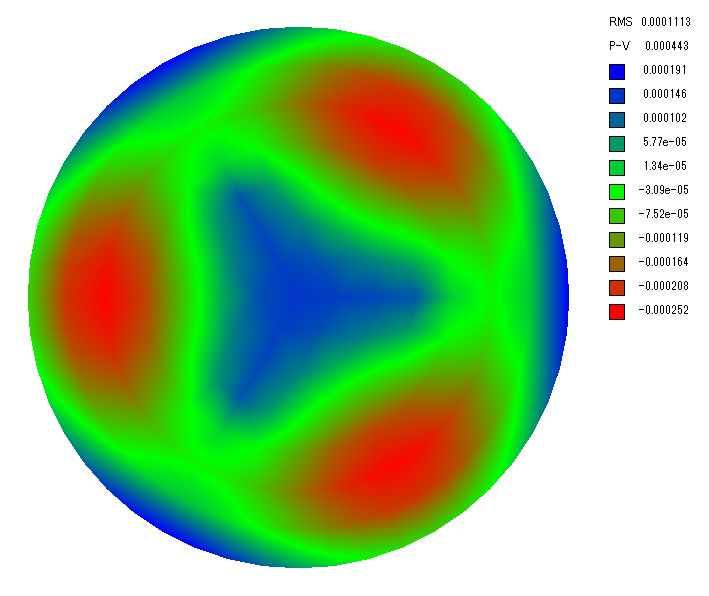
| 3 | 111 nm | 443 nm |
| 6 | 13.8 nm | 60.4 nm |
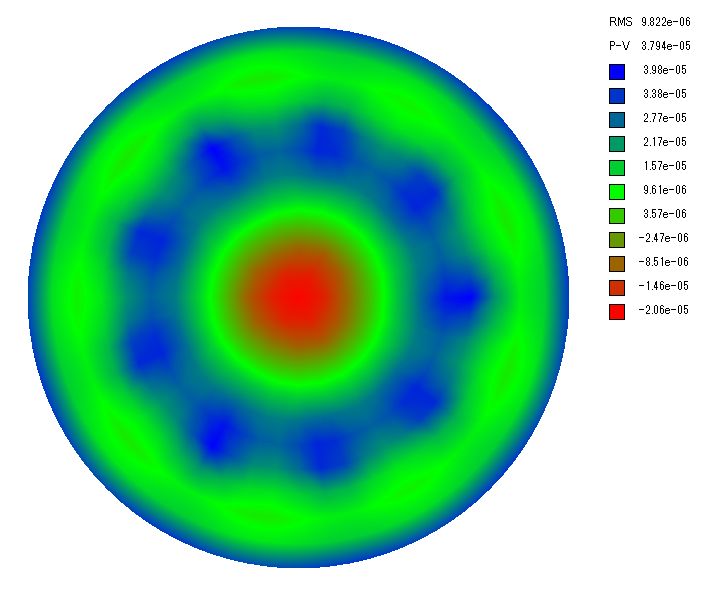
| 9 | 9.82 nm | 37.9 nm |
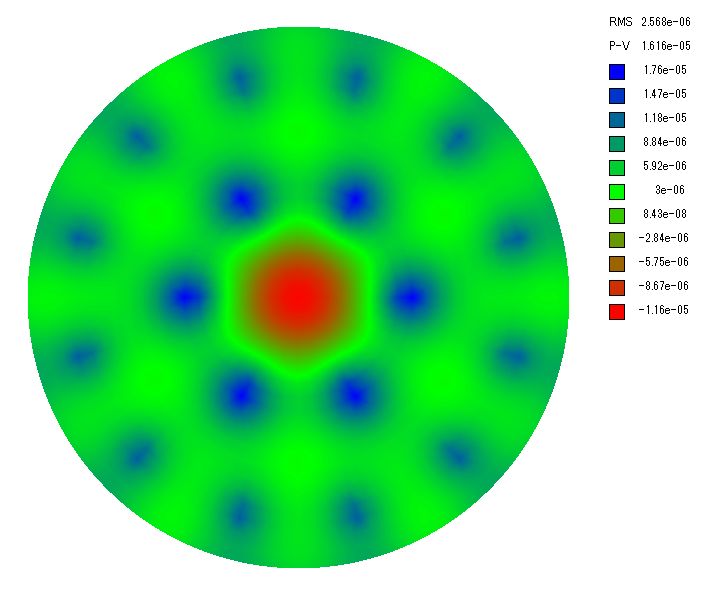
| 18 | 2.57 nm | 16.2 nm |
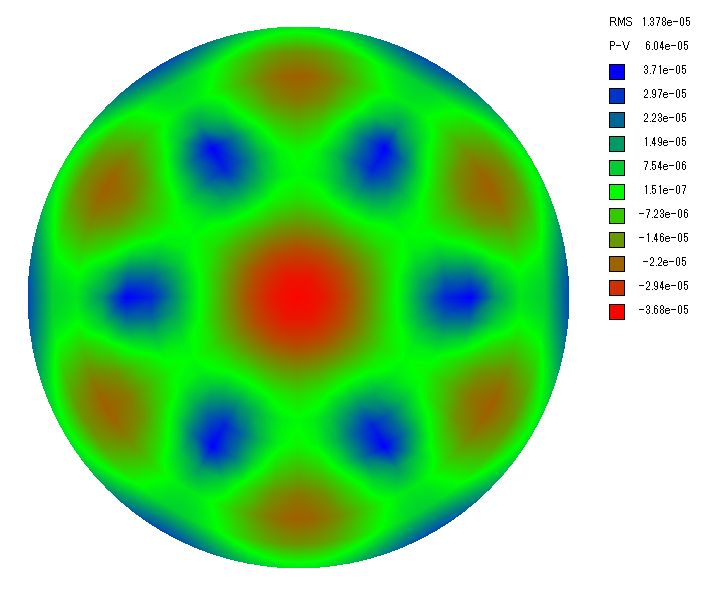
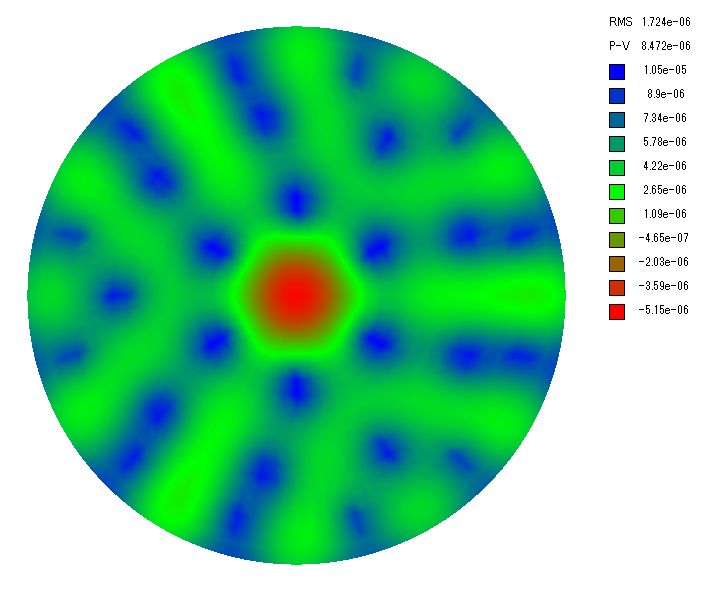
| 27 | 1.72 nm | 8.47 nm |
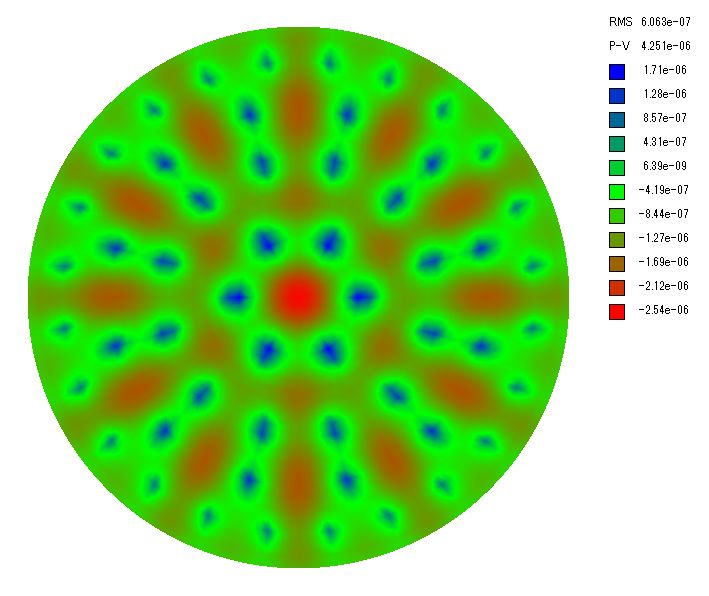
| 54 | 0.606 nm | 4.25 nm |
ここで波長505nm(暗順応視感度のピーク)の場合の波面誤差を計算します。 波面誤差は鏡面誤差の2倍なので支持点が3点、6点、9点、18点、27点、54点の場合、PVの波面誤差は約1.8λ、λ/4.2、λ/6.7、λ/16、λ/30、λ/60と計算されました。
4.1.3. 光学系の精度 に書いたようにレーリー・リミットを満たすためには光学系全体でPVの波面誤差はλ/4以下でなければなりません。 光学系全体としてレーリー・リミットを満たすためには主鏡裏面の支持点を出来るだけ多くし、鏡面誤差を発生させないようにする必要があることがわかりました。しかしセルの構造が複雑になると工作の難易度が上がり、適切に設計しないと主鏡セル自身のたわみも問題になってしまうと考えられます。 主鏡セルはある程度はシンプルな構造としたほうがよさそうです。 そこで自作60cmドブソニアン計画では主鏡裏面の支持方法として18点支持を採用することにします。 この場合、主鏡は裏面の18点支持によってPVで約λ/16の波面誤差の発生が見込まれます。
ページの先頭に 戻る
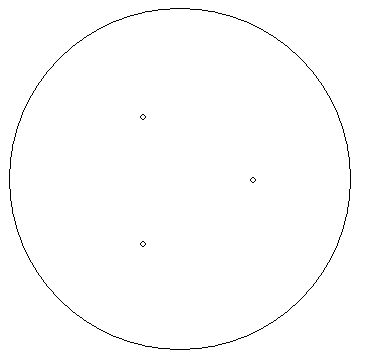
4.3.1.1. 3点支持 (RMS=111nm, PV=443nm)
ページの先頭に 戻る
4.3.1.2. 6点支持 (RMS=13.8nm, PV=60.4nm)
ページの先頭に 戻る
4.3.1.3. 9点支持 (RMS=9.82nm, PV=37.9nm)
ページの先頭に 戻る
4.3.1.4. 18点支持 (RMS=2.57nm, PV=16.2nm)
ページの先頭に 戻る
4.3.1.5. 27点支持 (RMS=1.37nm, PV=7.99nm)
ページの先頭に 戻る
4.3.1.6. 54点支持 (RMS=0.606nm, PV=4.25nm)
ページの先頭に 戻る
4.3.1.7. 参考:自作40cmドブソニアンの場合 (18点支持, RMS=0.629nm, PV=3.82nm)
参考として自作40cmドブソニアンの場合も計算してみました。 PVの波面誤差は約λ/66と計算され、主鏡セルでほぼ収差は発生していないことが分かりました。
ページの先頭に 戻る
4.3.2. 主鏡裏面の支持点のバランス
結論:自作60cmドブソニアン計画では主鏡裏面の支持点のバランスを考慮して製作する。
Lockwood Custom Optics の A modern guide to mirror support に主鏡や副鏡の支持方法についての考察があります。 この考察の "Rear Support Considerations" によると、バランスの取れていない主鏡裏面の支持機構だとトルク(モーメント)が生じてしまい星像が悪化する、と指摘されています。
そこで今回自作する60cmドブソニアンでは支持点のバランスを合わせることでトルクが生じない構造にしたいと考えます。
重心(質量の中心)、すなわちモーメントがゼロとなる点は ![]() は以下の式で表せます。
は以下の式で表せます。
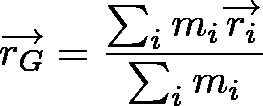
ここで mi は各要素の質量、 ![]() は各要素の位置を表します。
この式を解き直すと
は各要素の位置を表します。
この式を解き直すと
![]()
となります。
![]() をベクトルの原点とすると
をベクトルの原点とすると ![]() となるため、
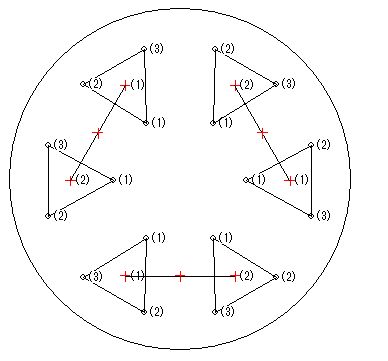
各要素の質量に各要素の高度軸からの距離をかけたものの和がゼロとなる位置に支点を設ければ良いことになります。
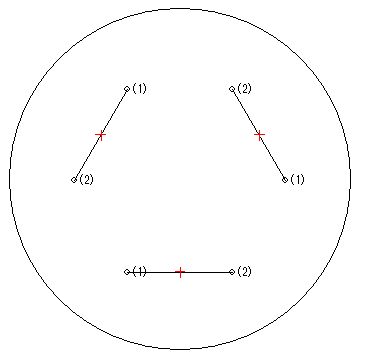
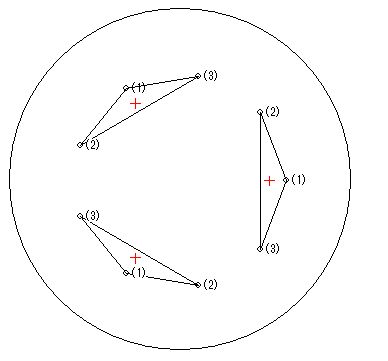
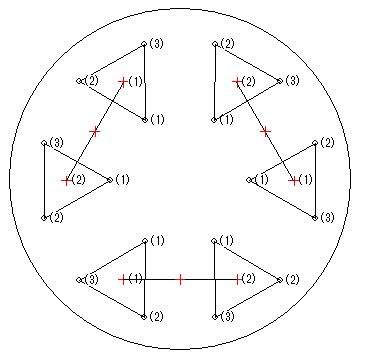
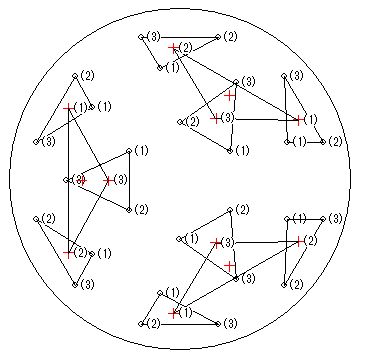
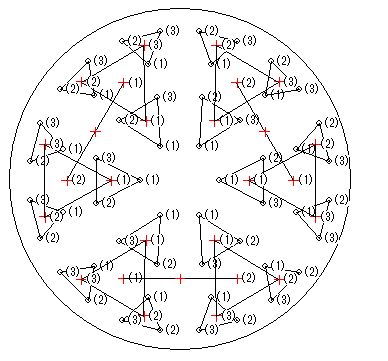
60cmドブソニアン計画で採用する18点支持機構とは2つの三角形の板を細長い板で繋いだ構造が3つ並ぶことになります。
この細長い棒の支持点がバランスの合う位置に来るよう設計すれば良いことになります。
となるため、
各要素の質量に各要素の高度軸からの距離をかけたものの和がゼロとなる位置に支点を設ければ良いことになります。
60cmドブソニアン計画で採用する18点支持機構とは2つの三角形の板を細長い板で繋いだ構造が3つ並ぶことになります。
この細長い棒の支持点がバランスの合う位置に来るよう設計すれば良いことになります。
ページの先頭に 戻る
4.3.3. 主鏡裏面の支持点の材質
結論:自作60cmドブソニアン計画では主鏡裏面の支持点として「テフロン」を使用する。
主鏡裏面を支える支持点は伝統的にフェルトやコルクなどのやわらかい材質で作られているように思います。 これは均一な力で主鏡を支え、アスを発生させないための工夫だと考えられます。 私の自作40cmドブソニアンでも主鏡裏面の支持点にコルクを使用してきました。
しかしこれらフェルトやコルクは「やわらかい」素材のため、望遠鏡の傾きに応じて主鏡裏面の支持点にかかる圧力が変化したとき、支持点の厚さも変化し、光軸ズレや星像にアスを生じさせてしまう可能性があると考えられます。 またフェルトやコルクは比較的「摩擦」が大きいため、望遠鏡が傾いているときはこの摩擦力から生じる力が主鏡裏面に加わり、これも光軸ズレや星像にアスが生じる原因になると考えられます。
そこで自作60cmドブソニアン計画では主鏡裏面の支持点としてテフロンを使用する事を考えます。 テフロンは 摩擦係数 が 0.1 と小さく、またコルクやフェルトと比べ十分に固い材料です。 テフロンを主鏡の裏面支持とすることで、望遠鏡の傾きに応じて生じる支持点の厚さ変化はその硬さから殆ど生じず、また摩擦係数が小さいので摩擦力も殆ど生じなくなり、光軸ズレやアスが生じにくくなるのではないかと期待します。
なお主鏡裏面に固いテフロンパッドを使うと主鏡裏面のデコボコなどが吸収できないのでは?という意見をいただきましたが、一般に主鏡の裏面は平滑に研磨されているためその心配はないと考えます。裏面がデコボコしていると表面の研磨にも影響が出るそうで、研磨工程の最初に裏面を平滑にするのだそうです。
ページの先頭に 戻る
2019年4月追記
主鏡裏面の支持点として「テフロン」はよくなく「デルリン」がよいと聞いたので交換してみましたが有意な違いはありませんでした。 その後も交換が面倒なので自作60cmドブソニアンの裏面支持点はデルリンのままですが、特に差はなく、テフロンでもデルリンでもどちらでもよいように思います。 要は硬く平滑なパッドを使用することが裏面支持点にとって重要なことではないか、と思います。
ページの先頭に 戻る
4.3.4. 主鏡側面の支持方法
結論:自作60cmドブソニアン計画では「45度離れた円周上の4点支持」で主鏡側面を支持する。
Cruxis Telescope の Mirror Edge Support Calculator を用いる事で主鏡側面の支持方法毎にたわみ量を計算することが出来ます。 そこで Mirror Edge Support Calculator を使って自作60cmドブソニアン計画のスペックで見込まれる主鏡側面の支持方法毎のたわみ量を計算してみました。
| 主鏡直径 | 609.6 mm |
| 主鏡厚さ | 38.1 mm |
| F値 | 3.3 |
| 水平時のたわみ量(RMS) | |
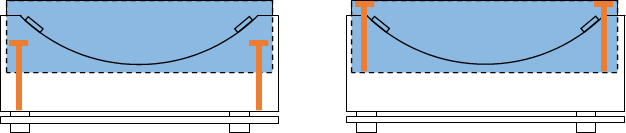
| ケーブルによる180度円周支持 | 3.5 nm |
| 120度離れた円周上の2点支持 | 32.1 nm |
| 90度離れた円周上の2点支持 | 6.8 nm |
| 45度離れた円周上の4点支持 | 3.9 nm |
4.3.1. 光学系の精度 に書いたように、レーリー・リミットを満たすためにはPVの波面誤差はλ/4以下でなければいけません。 Mirror Edge Support Calculator で計算されるたわみ量はRMSなのでレーリー・リミットを満たしているかどうかは分かりませんが、同ウェブサイト内には「RMSが 5 nm 以下であれば主鏡のたわみによるアスの発生は見分けられず、事実上完璧な側面支持といえる」といった記載が見られます。 そのため自作60cmドブソニアン計画の場合も主鏡の側面支持によるたわみ量が 5 nm 以下になることを目指します。
Obsession Telescope, Tele-kit等のドブソニアンでは「ケーブルによる180度円周支持」が主鏡側面の支持方法として用いられているようです。 私の製作した自作40cmドブソニアンもこの方法を用いてきました。 また口径40cmまでの市販のドブソニアン (Sky-Wacher等) では円周上を3点ないし4点で支える構造のセルが多いように思います。 これに対し、JPAstrocraft や Starmaster のドブソニアンには「45度離れた円周上の4点支持」が主鏡側面の支持方法といて採用されているようです。
計算結果から「ケーブルによる180度円周支持」が最もたわみ量が少ない支持方法であり、5nm以下であることが分かります。
しかしこの構造では主鏡はケーブルで吊られているだけなので主鏡が左右方向に自由に動いてしまう可能性があると私は考えます。 実際、私は 自作40cmドブソニアン の使用時にこの左右方向の自由度のために光軸をどれだけ厳密に追い込んでも数時間の使用で光軸ズレが生じてしまうといった問題があることに気がつきました。 またケーブル自体の伸縮の影響も考慮しなければいけません。
そこで自作60cmドブソニアン計画では「45度離れた円周上の4点支持」という方法で主鏡の側面を支えることを考えます。 この方法では主鏡が左右方向に動いてしまうことはないので使用中に光軸が狂うこともないはずです。 たわみ量自体も180度円周支持とほぼ同等です。
ページの先頭に 戻る
2019年4月追記
高倍率の星像で見られる非点収差の原因が主鏡側面の支持方法によるものかどうか、「ケーブルによる180度円周支持」に変更して試してみました。
しかし変更前と変更後で星像の非点収差に有意な違いはありませんでした。 そして何度も書いているようにケーブルによる180度円周支持だと主鏡が左右方向に自由に動いてしまい光軸が使用中にズレてしまいました。 そのため現在の自作60cmドブソニアンでは主鏡側面の支持方法は「45度離れた円周上の4点支持」に戻しました。
ページの先頭に 戻る
4.3.5. 主鏡側面の支持点の位置
結論:主鏡側面の支持点の位置は 0.8 mm 以下の精度で正確に合わせる必要がある。
Cruxis Telescope の Mirror Edge Support Calculator では「主鏡の側面の支持は厳密に主鏡の重心位置で行うべきだ」と主張しています。 同ウェブページでは主鏡位置が主鏡厚さの 1/20 (本計画の場合だと 1.9 mm) ずれた場合のたわみ量も計算することが出来ます。 計算の結果、たわみ量は 10.9 nm となってしまうことが分かりました。 ここで「RMSが 5 nm 以下であれば主鏡のたわみによるアスの発生は見分けられず、事実上完璧な側面支持といえる」といったことから、許容されるたわみ量を推定します。 単純にたわみ量がズレ量に比例すると仮定すると約 0.8 mm のズレで 5 nm のズレとなります。 主鏡側面を支える位置は高い精度で正確に位置を合わせる必要があることがわかりました。
ページの先頭に 戻る
4.3.6. ゆりかご式か個別サポート式か
結論:「ゆりかご式」の主鏡セルは重量が重くなる欠点があるが、主鏡をより理想的に支えることができる。 自作60cmドブソニアン計画では「ゆりかご式」の主鏡セルを採用する。
主鏡セルの構造は大きく「ゆりかご式」と「個別サポート式」に分類できると私は考えています。 ここではまずこれらの違いを概観し、自作60cmドブソニアン計画でどちらを用いるか検討します。
4.3.6.1. 個別サポート式
個別サポート式とは主鏡裏面の支持機構が主鏡の光軸調整(主鏡の傾き調整)機構を兼ねている主鏡セルの構造のことです。(私が勝手に名付けました。) Obsession、AstroSystems、Webster 等のドブソニアンにこの構造が採用されているようです。
個別サポート式の利点は主鏡セルを構成する部品が必要最低限で、高い剛性と軽い重量を両立する構造であることです。
個別サポート式の欠点は光軸調整(主鏡の傾き調整)に伴って主鏡裏面・主鏡側面の支持点の位置が常に変化してしまい、必ずしも理想的に主鏡を支えられるとは限らないと考えられる点です。 主鏡側面の支持点は自由に光軸方向に動くような構造(ケーブルによるワイヤー支持等)としなければ、光軸調整によって主鏡側面の支持点の位置が変わってしまい、星像が悪くなるおそれがあります。
ページの先頭に 戻る
4.3.6.2. ゆりかご式
ゆりかご式とは主鏡裏面の支持機構・主鏡側面の支持機構を一体構造の「ゆりかご」に載せ、光軸調整(主鏡の傾き調整)は「ゆりかご」全体を傾けることで行う主鏡セルの構造のことです。(これも私が勝手に名付けました。) Starmaster、Starstructure、JPAstrocraft 等のドブソニアンにこの構造が採用されているようです。
ゆりかご式の利点は主鏡裏面・側面の支持点が光軸調整機構とは独立なので、いつでも理想的な位置関係で主鏡を支える事が出来ることです。 4.3.5. 主鏡側面の支持点の位置 に書いたように、主鏡側面の支持点の位置は高い精度で合わせる必要がありますが、ゆりかご式では光軸にかかわらず理想的な位置で支える事が出来ます。
ただし、ゆりかご式の欠点は個別サポート式と比べて「ゆりかご」という構造が増えるため、重くなることです。
ページの先頭に 戻る
4.3.7. 主鏡セル自体のたわみ
結論:自作60cmドブソニアン計画では主鏡セルは1 inch 鉄角パイプで製作する。 0.2 mm 程度のピント位置のズレや光軸ズレの原因となる可能性があるが、主鏡セルを原因として非点収差等は生じないと考えられる。
主鏡のたわみの他、主鏡セル自体のたわみ量も考慮に入れる必要があると考えます。 有限要素法を使って応力を数値的に計算すれば主鏡セル全体のたわみ量を求める事が出来るはずです。 残念ながら私にはそのスキルはないので、単純なモデルを考え、各部で生じる最大のたわみ量を計算し、主鏡セルが水平のときと垂直のときでどれだけ主鏡セル全体がたわむか推定することにします。
らくちん設計.com を使うことで簡単に梁のたわみ計算を行うことができます(ブラウザは Internet Explorer でないとうまく表示出来ないようです)。 そこでこのウェブサイトを使って主鏡セルで構造が単純な部分のたわみ計算を行うことにします。 「ゆりかご」と「18点支持の三角板を繋ぐリンク」の2つについて、自作60cmドブソニアン計画で使用しようと考えている材料を用いて、望遠鏡が天頂を向いているときのたわみ量を計算しました。
| ゆりかご | リンク | |
| 梁の長さ | 660 mm | 200 mm |
| 材質 | 鉄 | 鉄 |
| 荷重 | 8.4 kg | 7.6 kg |
| 断面形状 | 1" 角パイプ | 2"x1/2" コの字 |
| 断面厚さ | 1/16" | 1/8" |
| 自重によるたわみ量 | 0.0097 mm | 0.00073 mm |
| 荷重によるたわみ量 | 0.17 mm | 0.025 mm |
計算結果から、上記材料を使用した場合、主鏡セルで少なくとも 0.2 mm 近いたわみが発生することが分かりました。 これは天頂を向いている時と水平に近い高度を見ている時とで、均等にたわんだ場合はピント位置が 0.2 mm ズレることを意味すると考えられます。 また不均等にたわんだ場合には光軸(主鏡の傾き)がズレてしまうことも考えられます。
ただしこの主鏡セルのたわみ自体は非点収差の原因にはならないようです。 主鏡セルがたわんだとしても 4.3.3. 主鏡裏面の支持点の材質 をテフロンとすれば、その低摩擦からセルの上で主鏡は容易に滑ることが可能で、そのため主鏡にアス(非点収差)が生じたりすることはないと思われます。 4.3.1. 主鏡裏面の支持方法 や 4.3.2. 主鏡裏面の支持点のバランス が適切で、4.3.3. 主鏡裏面の支持点の材質 の摩擦が十分に小さければ非点収差は生じないと思われます。
ちなみに「ゆりかご」の材料としては 1" 鉄角パイプでなく、もう少し太い鉄角パイプも入手可能のようなので、これらについても計算を行いました。 1-1/4" 鉄角パイプは近所の Home Depot で入手可能で、1-1/2" の鉄角パイプは Amazon.com で入手可能です。
| 断面形状 | 1"鉄角パイプ | 1-1/4"鉄角パイプ | 1-1/2"鉄角パイプ |
| 断面厚さ | 1/16" | 1/16" | 1/12" |
| 自重によるたわみ量 | 0.0097 mm | 0.0061 mm | 0.0043 mm |
| 荷重によるたわみ量 | 0.17 mm | 0.082 mm | 0.036 mm |
1-1/2" 鉄角パイプだとたわみ量はだいぶ小さくなるようです。 ただし、太い鉄角パイプを使うと主鏡セルは重くなってしまいます。 4.3.6. ゆりかご式か個別サポート式か で述べたように、ゆりかご式だとどうしても重くなってしまうという欠点があります。
なお今回推定したのは計算しやすい「ゆりかご」と「18点支持の三角板を繋ぐリンク」のみで、実際の主鏡セルにはさらに主鏡裏面サポートの三角板や主鏡セルのフレームもあります。 実際にはこれらもたわむと考えられるため、主鏡セル全体のたわみ量はさらに大きくなると考えられます。
ページの先頭に 戻る
4.3.8. 主鏡の光軸調整
結論:自作60cmドブソニアン計画では主鏡の光軸調整は電動で出来るようにする。
2.11. 光軸調整 に書いたとおり、主鏡光軸の調整のため、主鏡裏と接眼部を何度も往復することになります。 この作業はとても面倒で、また1人だと調整と移動量の確認を同時に行えないため正確な光軸調整を困難にします。
そこでこの面倒な作業を回避することを考えます。「前方から長いツールを使って手動で調整する」「モーターを組み込んで電動で調整する」という2つの方法が考えられます。これらを比較検討し、どちらが自作60cmドブソニアン計画にふさわしいか考えます。
4.3.8.1. 前方から長いツールを使って手動で調整
名前の通り、鏡筒の前方から長いツールを使って主鏡の光軸調整ネジを手動で回す方式です。接眼部に光軸調整アイピースを取り付け、これを覗きながら長いツールを使って主鏡の光軸調整ネジを回すことで主鏡の光軸を手動で合わせます。製品としては 笠井トレーディング で市販されていた TORINO-400DX というイタリア製の16"ドブソニアンがこの「前方から長いツールを使って手動で調整」する方式を採用していたと思います。
メリットとしては手動のため確実に光軸調整が行えることですが、誤ってツールを主鏡に接触させる可能性があること、長いツールがかさばって邪魔であること等のデメリットが考えられます。
ページの先頭に 戻る
4.3.8.2. モーターを組み込んで電動で調整
こちらも名前の通り、主鏡の光軸調整ネジにモーターを組み込んで電動で調整する方式です。接眼部に光軸調整アイピースを取り付け、これを覗きながら手元のコントロールボックスのスイッチを操作して電動で主鏡光軸調整ネジを回すことで光軸を合わせます。製品としては JMI Telescopes から "ColliMotor" という名前の製品が市販されていました。 ColliMotor は Meade の LightBridge 16" ドブソニアンの主鏡光軸調整ネジに後付けし、電動で光軸調整ネジを回転出来るようにするものでした。
電動式のメリットは長いツールと違って主鏡を傷つけてしまう可能性がないことですが、デメリットとして電気的なトラブルがあった場合に光軸調整が出来なくなってしまう可能性があることです。また電動の光軸調整機構を組み込むことになるため、メカが複雑になります。
双方にメリット・デメリットがあることが分かりましが、自作60cmドブソニアン計画では誤ってツールで主鏡を傷つけてしまう可能性だけは絶対に排除したいと考えます。そこで主鏡の光軸調整は「モーターを組み込んで電動で調整する」方式を採用したいと考えます。
ページの先頭に 戻る
2019年4月追記
自作60cmドブソニアンの実際の製作では、タミヤの 4速ウォームギヤボックスHE を使用し、またタイミングプーリーとタイミングベルトを介して主鏡の光軸調整を回す構造としました。非常に快適に使用できています。
ページの先頭に 戻る
4.3.9. トラス棒との接続 <設計変更>
結論(設計変更):自作60cmドブソニアン計画ではトラス棒はミラーボックスに接続する。
(過去の結論:自作60cmドブソニアン計画ではトラス棒は直接主鏡セルに接続する。)
自作60cmドブソニアン計画では主鏡裏面の支持機構・主鏡側面の支持機構を一体構造のゆりかごに載せ、光軸調整(主鏡の傾き調整)はゆりかご全体を傾けることで行う構造の主鏡セル「ゆりかご式」を採用することにしました。 この「ゆりかご」全体をがっちりと支え、光軸調整を行うため、主鏡セルには丈夫な「枠」を設ける事になります。
枠は「ゆりかご」と同様、1" 鉄角パイプで製作することを考えます。ここで「枠」を十分に高い剛性のものに製作することが出来れば、通常のドブソニアンで使われているような重たい(が剛性もそこそこある)ミラーボックスが不要になるのではないか、と考えます。また通常トラス棒はミラーボックスを介して取り付けることになりますが、トラス棒を「枠」にダイレクトに取り付ける構造とすればより剛性を高くできるのではないか、と考えます。
そこで自作60cmドブソニアン計画では「ゆりかご式」の主鏡セルを納める「枠」を高剛性に作り、そこにダイレクトにトラス棒を接続する設計とすることにします。またミラーボックス自体には強度が不要なため、ミラーボックスは主鏡保護のための簡単な構造のものとすることにします。
ページの先頭に 戻る
<設計変更>
当初設計ではミラーボックスに強度を持たせず単に主鏡を保護するための構造としていましたが、トラス棒を6本から8本に変更した際に工作の都合と主鏡セル周辺の剛性アップを意図してトラス棒は主鏡セルではなくミラーボックスに接続する構造に変更しました。
ページの先頭に 戻る
4.3.10. 主鏡セルの重量
結論:自作60cmドブソニアン計画では剛性を確保しつつできるだけ軽量な主鏡セルを目指す。 具体的には主鏡セル単独で10.5 kg未満、「主鏡」+「主鏡セル」+「ミラーボックス」の合計で40kg未満となるように製作する。
小型のドブソニアンの場合には重心位置の調整のためあえて主鏡セルを重く作る事も考えられますが、自作60cmドブソニアン計画の場合には主鏡だけでも20kgを超えることがほぼ確実です。 そこで主鏡セルとしてはあえて重く作るようなことは考えず、できるだけ軽くなるよう工夫することを考えます。 ただし剛性の不足は光学性能を低下させ操作感を悪化させてしまうため、無理な軽量化は目指さないことにします。
自作40cmドブソニアンで製作した主鏡セルの重量は3.1kgでした。 今回は口径が60cmとなるので口径は1.5倍、体積は1.53=3.375倍とるため自作40cmドブソニアンの主鏡セルと同じ程度だと考えると3.1×3.375=約10.5kg程度の重さが妥当な重さと考えられます。
また 4.4. ミラーボックス で検討するように自作60cmドブソニアン計画では「主鏡一体式」のミラーボックスとしたいと考えています。 そのため主鏡セル単独の重さはあまり意味がなく、主鏡+主鏡セル+ミラーボックスの合計の重量が一人で持ち上げられる重量であるかないかが重要になります。 4.2.3. 主鏡の重量 が25kg未満、4.4.3. ミラーボックスの重量 が4kg未満となるように製作するため、主鏡セル10.5kg程度を合わせて合計で40kg未満となるように製作したいと思います。
40kg未満であれば一人で持ち運んだり、車から出し入れして組み立てたりといったことも問題なく行えるはずと考えます。
ページの先頭に 戻る
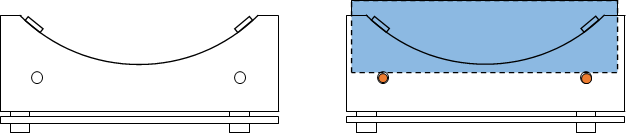
4.3.11. 主鏡の脱落防止
結論:自作60cmドブソニアン計画では主鏡の脱落防止機構を備える。
2.2. 主鏡セル に書いたとおり、自作40cmドブソニアンでは主鏡押さえ爪(脱落防止機構)を用意しなかったため水平以下に向けると主鏡が落下する可能性がありました。 これは主鏡押さえ爪による影が星像に影響することを懸念してあえて無しとしましたが、実際、胎内星祭りで運搬中に主鏡を落としてしまったり、強風にあおられて望遠鏡が水平以下を向いて主鏡が落ちてしまったり、またそうでなくても低空の天体を見るときにどこまで安全に向けられるか不安に感じたり、よくありませんでした
自作60cmドブソニアン計画では主鏡を落下させることは絶対に避けたいと考えます。 そこで主鏡セルには主鏡の脱落防止機構を組み込むことにします。 ただし、やはりできるだけ主鏡の脱落防止機構による光学的な影響を少なくしたいため、脱落防止機構は副鏡スパイダーの影になる位置に設けたいと考えます。
ページの先頭に 戻る
4.3.12. ジャッキ機構 <設計変更>
結論(設計変更): 高度軸を取り外し可能な構造とするためのジャッキ機構は主鏡セルには設置しない。(ロッカーボックスと「つっかい棒」で同等の機能を実現する。)
(過去の結論: 自作60cmドブソニアン計画では高度軸を取り外し可能な構造とするためミラーボックスに「ジャッキ機構」を取り付ける。)
自作60cmドブソニアン計画では高度軸を取り外し可能な構造とするため主鏡セルに「ジャッキ機構」を取り付けて望遠鏡の組み立てを安全に確実に行えるようにしたいと考えます。
ここで、望遠鏡の組み立ての際、まずロッカーボックスを地面に置き、その次にミラーボックス(主鏡・主鏡セルを含む)をロッカーボックスの上に置くことになります。 ここで「ジャッキ機構」を操作してジャッキ長を長くすることでミラーボックスを所定の位置より少しだけ浮かせ、この状態で高度軸を取り付ける、ということを考えました。
ジャッキ機構を使用することで40kg近くなると予想されるミラーボックス(主鏡・主鏡セル含む)を安全に持ち上げられ、簡単に高度軸を取り付けることができると考えます。 そして高度軸を取り付けた後は、ジャッキ機構を操作してジャッキ長を短くすることで高度軸の取り付けられたミラーボックスはロッカーボックスに静かに載り、高度軸として機能するようになります。
ページの先頭に 戻る
<設計変更>
当初は主鏡セルの四隅にM8ボルトのジャッキを取り付けたのですが、ジャッキアップやジャッキダウンにかなりの時間が必要で、また手が2本しかないのにボルトを同時に4本回さないといけないという矛盾した構造であったため、この主鏡セルに組み込んだジャッキ機構はうまく機能しませんでした。
そこでジャッキ機構の代わりに考えたのが「つっかい棒」でした。 要は組み立て時にミラーボックスを少しだけ浮かせられれば簡単に高度軸を取り付けられるようになるので、ロッカーボックスのちょうどいい高さに「つっかい棒」が差し込めるようにして、このつっかい棒の上にミラーボックスを載せ、ここで高度軸を接続する構造にしました。
高度軸を取り付けた後、つっかい棒を取り外せば、ミラーボックスはロッカーボックスに安全に載り、高度軸として機能するようになります。 これが合理的で十分な設計でした。
ページの先頭に 戻る